How to brake UAV during high speed flight with pixhawk ? #4552
Replies: 5 comments
-
|
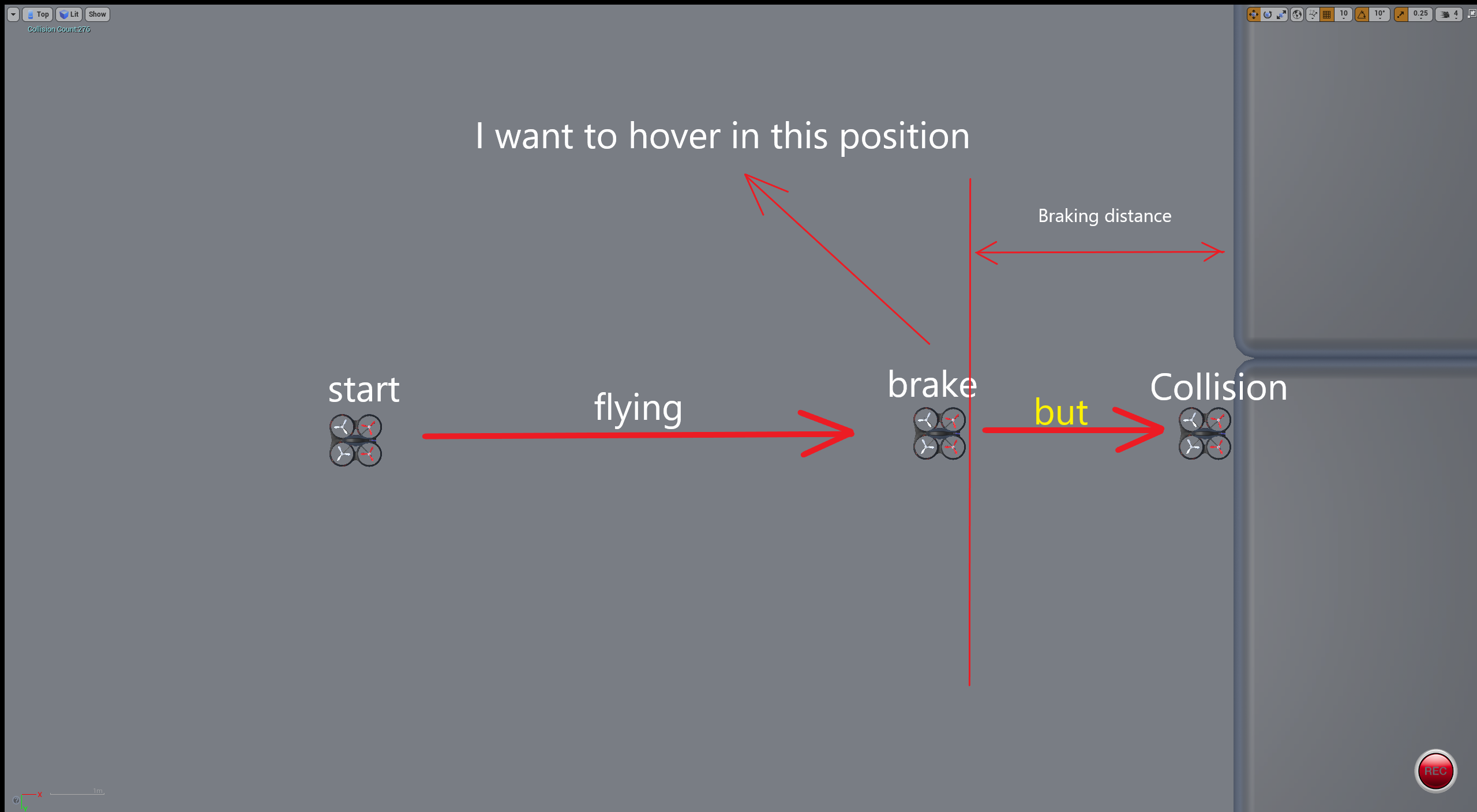
@LOVE-MJ Not sure if I understand the question. But if you want the drone to just instantaneously stop on cue while flying at a high speed, I'm not sure if that's entirely doable just because of the way the simulated physics work (since realistically the drone can't not have inertia). |
Beta Was this translation helpful? Give feedback.
-
|
@ahmed-elsaharti I've tried the way you said. The attitude of UAV is not what I want . |
Beta Was this translation helpful? Give feedback.
-
|
@LOVE-MJ I'm not sure I understand what you're trying to do exactly Edit: on re-reading the edited comment I think I somewhat get what you're trying to do. To have the quad avoid obstacles I think you would need to write your own piece of code to use the sensor data (maybe lidar) through the APIs to try detect an obstacle and slow down or even hover before collision. |
Beta Was this translation helpful? Give feedback.
-
|
@ahmed-elsaharti What you understand is right. But I have tried many methods, I don't know what function to achieve, how to solve it ? |
Beta Was this translation helpful? Give feedback.
-
|
If you tell it to fly to the new position away from the wall PX4 will do a pretty aggressive banked turn. If you also tell it to fly back in the exactly direction it was coming from PX4 will do a steep banked stop to change directions. You might be able to configure PX4 to be more aggressive by increasing these limits in the [PX4 parameters](https://docs.px4.io/master/en/advanced_config/parameter_reference.html. Basically check all the |
Beta Was this translation helpful? Give feedback.
Uh oh!
There was an error while loading. Please reload this page.
-
When I switch to hover mode, the brake will have inertia, and the UAV can't brake immediately. How to achieve this.
Beta Was this translation helpful? Give feedback.
All reactions